������Q���Ϻ�����늚⼼�g(sh��)����˾
(li��n)ϵ�ˣ�������������
(li��n)ϵ�֙C(j��)��
�̶��Ԓ��
��I(y��)�]�䣺192061030@qq.com
(li��n)ϵ��ַ���Ϻ����ɽ��^(q��)���±�·1800Ū���ɽ�����̄�(w��)�@�^(q��)��
�]����201501
(li��n)ϵ�ҕr(sh��)��Ո(q��ng)�f(shu��)���ں��ľW(w��ng)�Ͽ����ģ��x�x��
���T��G120����6SL3225-0BE33-0UA0

|
6SL3225-0BE33-0UA0
SINAMICS G120 ����ģ�K PM 250 δ�^(gu��)�V �������� 380-480V+10/-10% ���ཻ�� 47-63Hz ���^(gu��)�d���ʣ�30kW ��(d��ng) 200% 3S��150% 57S�� 100% 240S���h(hu��n)���ض� 0 �� +50��C �p�^(gu��)�d���ʣ�37kW ��(d��ng) 150% 3S��110% 57S�� 100% 240S���h(hu��n)���ض� 0 �� +40��C 499x 275x 204����x��x�,FSE ���o(h��)�ȼ�(j��) IP20 �o(w��)���Ɔ�Ԫ�� BOP
|
���T��G120����6SL3225-0BE33-0UA0
____________________
SIEMENS
ϣ��늚⼼�g(sh��)���Ϻ�������˾ (�������T��)
(li��n)ϵ�ˣ�����(�N�۹��̎�)
�֙C(j��)��18621061383��24С�r(sh��)�ۺ��g(sh��)����(w��)��
�̄�(w��)QQ:192061030
�]�䣺192061030@qq.com
�Ԓ��TEL��:021-60541249
��˾�����_(k��i)���I(y��)��ֵ���l(f��)Ʊ
�a(ch��n)Ʒ�����b�Ͼ���Ψһ��ϵ��̖(h��o)���{������̖(h��o)���|(zh��)��һ�ꡣ
ϣ��늚⼼�g(sh��)���Ϻ�������˾��һ�Ҍ��I(y��)�������T��/���I(y��)�Ԅ�(d��ng)���a(ch��n)Ʒ�͔�(sh��)��ϵ�y(t��ng)�N�ۡ����g(sh��)����(w��)����Ӗ(x��n)�Ĺ��̷���(w��)��˾��
һ������
S120 �ЃɷN��ʽ��
���ڶ��Sϵ�y(t��ng)�� DC/AC �b��
���چ��Sϵ�y(t��ng)�� AC/AC �b��
�@�ɷN��ʽ�� Firmware V2.4 �����ϰ汾���Ѿ߂������λ���ܡ���(d��ng)ǰV2.4 �汾�� S120�������¶�λ���ܣ�
? �c(di��n)��(d��ng) (Jog)�� �����ք�(d��ng)��ʽ�Ƅ�(d��ng)�S��ͨ�^(gu��)���oʹ�S�\(y��n)����Ŀ��(bi��o)�c(di��n)
? ���� (Homing/Reference)�����ڶ��x�S�ą����c(di��n)���\(y��n)���л���
? ��λ (Limits)�����������S���ٶȡ�λ�á�����ܛ��λ��Ӳ��λ
? ���� (Traversing Blocks)�� ��64��(g��)�������Ԅ�(d��ng)�B�m(x��)��(zh��)��һ��(g��)�����ij���Ҳ�Ɇβ���(zh��)��
? ֱ���O(sh��)��ֵݔ��/�ք�(d��ng)�O(sh��)��ֵݔ�� (Direct Setpoint Input / MDI)��Ŀ��(bi��o)λ�ü��\(y��n)���ٶȿ�����λ�C(j��)��(sh��)�r(sh��)���ơ�
ʹ�� S120 ������λ���ܵ�ǰ��l����
�{(di��o)ԇܛ����Starter V4.0 ����߰汾 / SCOUT V4.0 ����߰汾
Ӳ���汾��SINAMICS FW: V2.4 HF2 ����߰汾
ע��
���b SCOUT V4.0 ��ҪSTEP 7 �汾���ٞ� V5.3.3.1 ����
����������������
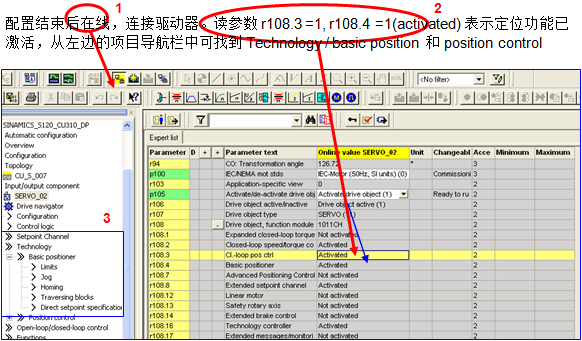
S120�Ķ�λ���ܱ����׃�l���x�������м�����E���£�
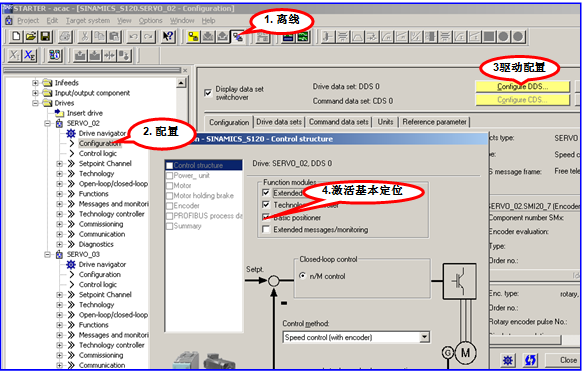
��λ���ܼ�����ʹ��STARTER�еĿ�������?q��)��҅��?sh��)���M(j��n)���O(sh��)��
��λ���ܼ�����ʹ��STARTER�еĿ�������?q��)��҅��?sh��)���M(j��n)���O(sh��)��
ʹ�ÿ������ ʹ�Ì��҅���(sh��)��
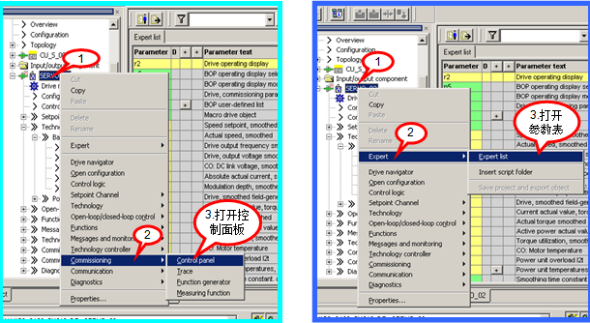
ʹ�ÿ������IJ������E��
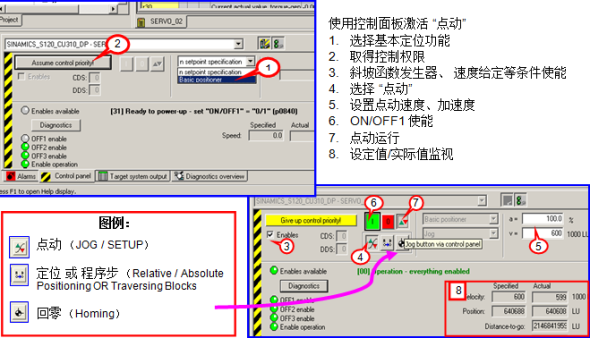
����������λ_�c(di��n)��(d��ng)��JOG��
S120 �л�����λ���ܵ��c(di��n)��(d��ng)�ЃɷN��ʽ��
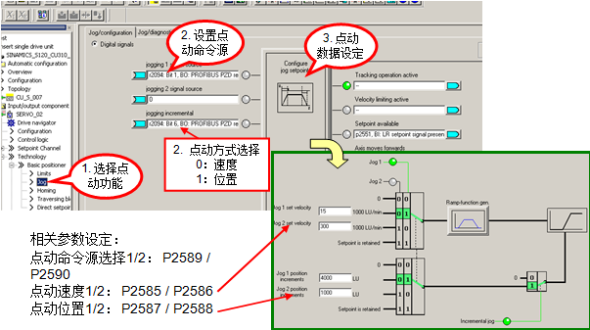
? �ٶȷ�ʽ( travel endless)���c(di��n)��(d��ng)���o���£��S���O(sh��)�����ٶ��\(y��n)��ֱ�����oጷš�
? λ�÷�ʽ( travel incremental)���c(di��n)��(d��ng)���o���²����֣��S���O(sh��)�����ٶ��\(y��n)����Ŀ��(bi��o)λ�ú��Ԅ�(d��ng)ֹͣ��
? ʹ�ÿ��������c(di��n)��(d��ng)���܃H�����ٶȷ�ʽ��λ�÷�ʽ��ʹ�Ì��҅���(sh��)���O(sh��)����
? ��(zh��)���c(di��n)��(d��ng)���ܣ���(y��ng)��ʹ��׃�l��ON/OFF1��P0840��
�ġ�������λ_���㣨Homing / Reference��
����/������Homing / Reference��
�����c(di��n)ģʽ������ģʽ��ֻ��ʹ���������a�������D(zhu��n)���a�� Reserver����/���Ҿ��a��Sin/Cos �� �}�_���a�����r(sh��)��Ҫ����ÿ����늕r(sh��)�������a���c�S�ęC(j��)еλ��֮�g�](m��i)���κδ_�����P(gu��n)ϵ������S����횱������A(y��)�ȶ��x�õ����c(di��n)λ�á�����(zh��)�� Homing ���ܡ�
��(d��ng)ʹ�ý^��(du��)���a�� ( Absolute ) �r(sh��)ÿ����늲������»��㡣
S120 �л��������N��ʽ��
? ֱ���O(sh��)�������c(di��n) (Reference): ��(du��)���⾎�a������
? ����(d��ng)���� (Reference point approach): ��Ҫָ�������a��
? ��(d��ng)�B(t��i)���� (Flying Reference)����(du��)���⾎�a������
4.1�O(sh��)�����c(di��n) (Set_Reference)
ͨ�^(gu��)�Ñ�������O(sh��)������λ�Þ�����(bi��o)ԭ�c(di��n)��ͨ����r��ֻ�Ю�(d��ng)ϵ�y(t��ng)���o(w��)�ӽ��_(k��i)�P(gu��n)�֟o(w��)���a�������}�_�r(sh��)�����߮�(d��ng)��Ҫ�S���O(sh��)�Þ�һ��(g��)��ͬ��λ�Õr(sh��)��ʹ��ԓ��ʽ
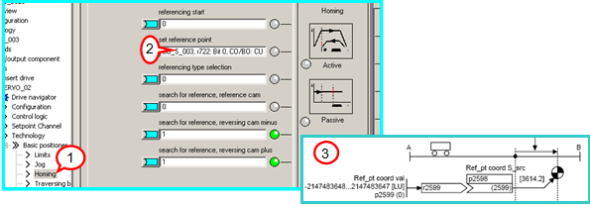
�������E�����O(sh��)���_(k��i)�P(gu��n)��ݔ���c(di��n) DI2 ��ON/OFF1����Դ P840��
1. �M(j��n)�롰Homing��
2. �B��һ��(sh��)����ݔ���c(di��n) ( DI 1 )������(sh��) P2596�����O(sh��)�Å����c(di��n)��̖(h��o)λ��ԓλ��������Ч
3. �O(sh��)�������c(di��n)λ������(bi��o)ֵ P2599���� 0��
4. �]��DI 2�\(y��n)��ʹ��
5. �]��DI 1 ����O(sh��)�Å����c(di��n)���������ԓ�S��(d��ng)ǰλ�� r 2521 �������Þ�P2599 ���O(sh��)����ֵ���� r2521=0
4.2����(d��ng)���㣨Active Homing��
����(d��ng)���㷽ʽֻ�m�����������a�����^��(du��)ֵ���a��ֻ���ڳ�ʼ���A���M(j��n)��һ�ξ��a��У��(zh��n)���Ժ�������
����(d��ng)���������N��ʽ��
�H�þ��a�����(bi��o)־λ( Encoder Zero Mark ) ����
�H���ⲿ���(bi��o)־( External Zero Mark ) ����
ʹ�ýӽ��_(k��i)�P(gu��n) + ���a�����(bi��o)־λ( Homing output cam + Zero Mark ) ����
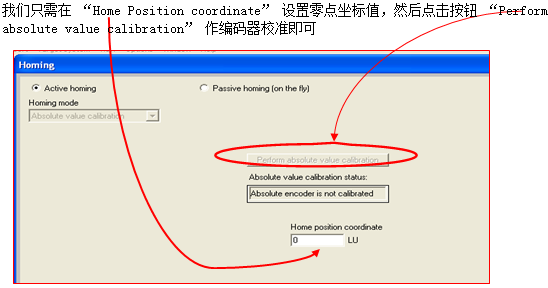
4.2.1�^��(du��)ֵ���a��������(d��ng)����
����҂�ʹ�ý^��(du��)ֵ���a������������(d��ng)����r(sh��)��(hu��)���������(y��)�棺
4.2.2�������a��������(d��ng)����
���D��ʾ�M(j��n)������
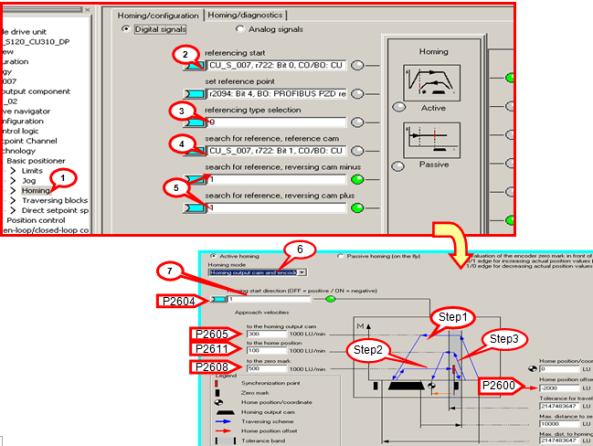
���P(gu��n)����(sh��)�O(sh��)��
1. �M(j��n)�� �� Homing �� (����) �(y��)��
2. ���x�_(k��i)�P(gu��n)��ݔ���c(di��n)DI 1���_(k��i)ʼ�����������(sh��)P2595=722.0��
3. ���㷽ʽ�x������(d��ng)����P2597=0
4. ���x�_(k��i)�P(gu��n)��ݔ���c(di��n)DI 2��ӽ��_(k��i)�P(gu��n) P2612= 722.1�����}�_��
5. ָ���S�\(y��n)�ИO���c(di��n)����������^(gu��)���ИO���c(di��n)���_(d��)��P2613/P2614=0���t�S���D(zhu��n)������c(di��n)ȫ����t�Sֹͣ��
6. ָ�����㷽ʽ���ӽ��_(k��i)�P(gu��n) + ���a�����}�_
7. ָ�������_(k��i)ʼ����P2604 (0:����1������)
��(d��ng)���^(gu��)�̣�
׃�l���\(y��n)��ON/OFF1�]�ϣ�DI 1�]�ϣ��_(k��i)ʼ�����^(gu��)��
? �ψD�У�Step1���S����P2604 ���x�����������������ٶ� P2572 �����������ٶ� P2605�����_(d��)�ӽ��_(k��i)�P(gu��n)��DI 2 �]�ϣ�,�����p�ٶ�P2573�p��ֹͣ���M(j��n)����һ�����������a�������}�_
? �S����������ٶ� P2608���x�_(k��i)�ӽ��_(k��i)�P(gu��n)��DI 2 ���_(k��i)�������ľ��a���ĵ�һ��(g��)���}�_���Sֹͣ���M(j��n)����һ���������c(di��n)
? �ψD�У�Step3���S����������ٶ� P2611�\(y��n)��ƫ�þ��xP2600��ֹͣ�څ����c(di��n)���������(d��ng)�����^(gu��)�̡�
4.3��(d��ng)�B(t��i)���㣨Passive Homing��
Passive Homing ����(d��ng)�B(t��i)���㣩�ַQ�� Homing on the fly
��(d��ng)�B(t��i)���������S���������ⶨλ��B(t��i)�r(sh��)��(d��ng)�B(t��i)�Į�(d��ng)ǰλ��ֵ���㣨�磺���c(di��n)��(d��ng)�r(sh��)����(zh��)�г��r(sh��)����(zh��)�� MDI �r(sh��)������(zh��)�Є�(d��ng)�B(t��i)�����Ӱ��S��(d��ng)ǰ���\(y��n)�Р�B(t��i)���S�����������Ļص����c(di��n)��ֻ���䮔(d��ng)ǰλ��ֵ���Þ�0�������_(k��i)ʼӋ(j��)��λ�á�
ǰ��l����P2597=1
�^��(du��)ֵ���a���Ą�(d��ng)�B(t��i)���㣺

����(sh��)�O(sh��)��
? ���_(k��i) �� Homing �� (����) �(y��)��
? ���x�_(k��i)ʼ��������P2595Դ�����_(k��i)�P(gu��n)��ݔ���c(di��n)DI2��
? ���㷽ʽ�x���(d��ng)�B(t��i)����P2597=1
? ָ���ӽ��_(k��i)�P(gu��n)Bero����������Ч�����ψD��P2511��
? ���x�_(k��i)�P(gu��n)��ݔ���c(di��n)DI 10��ֻ�ܞ����I / O����ӽ��_(k��i)�P(gu��n) P488= 722.10�����ψD��2��
��(d��ng)���^(gu��)�̣�
? ׃�l���\(y��n)�У�ʹ��ON/OFF1�����x������һ�N������c(di��n)��(d��ng)������MDI�ȣ��S�������x��ķ�ʽ�\(y��n)��
? �]��DI 2���_(k��i)ʼ��(d��ng)�B(t��i)����
? �]�Ͽ����_(k��i)�P(gu��n)DI 10���D�мtɫ����ԓ�_(k��i)�P(gu��n)��B(t��i)������Ҋ(ji��n)��λ�Ì�(sh��)�Hֵ�����֏�(f��)��0��������Ӌ(j��)ֵ����D�оGɫ����ʾ����������(g��)��(d��ng)�B(t��i)�����^(gu��)�����S���\(y��n)���ٶȲ���Ӱ푡�

�塢������λ_��λ��Limit��
S120 �а����ɷN��λ���ܣ�ܛ��λ��Ӳ��λ���������S�\(y��n)�з�����ͬ�r(sh��)߀�Ќ�(du��)�S�\(y��n)���ٶȣ��Ӝp�ٵ����ơ�
���D��ʾ������λ��ʽ
? �(xi��ng)Ŀ��(d��o)�������x����λ���܉K
? ����ܛ��λP2582 =1����/����λ�÷���ͨ�^(gu��) P2578, P2579�O(sh��)��
? ����Ӳ��λP2568 =1��Ӳ��λλ���_(k��i)�P(gu��n)Դ P2569, P2570
? ����ٶȣ�P2571�������ٶȣ�P2572�����p�ٶȣ�P2573

ע����λ�_(k��i)�P(gu��n)��̖(h��o)�� �� �� �� ��Ч
���_(d��)Ӳ��λ���S�������p�ٶ� P2573 ����ͣ܇����ʹ���Ϗ�(f��)λ��Ҳֻ���S�����\(y��n)��
����������λ_����Traversing Blocks��
ͨ�^(gu��)ʹ��Traversing Blocks _ ������ ģʽ�����Ԅ�(d��ng)��(zh��)��һ��(g��)�����Ķ�λ����Ҳ�Ɍ�(sh��)�F(xi��n)�β����ƣ�������֮�g��ͨ�^(gu��)��(sh��)����ݔ����̖(h��o)�ГQ����ֻ�Ю�(d��ng)ǰ����(zh��)�������һ������Ч��
��S120 ���ṩ����� 64��(g��)����ʹ�á�

����(zh��)��E��
1. �(xi��ng)Ŀ��(d��o)�������x�� Traversing Blocks ģʽ���O(sh��)���_(k��i)�P(gu��n)��ݔ���c(di��n)DI4���ڼ��������
2. ���ܽ^�΄�(w��) P2641= r722.2=1���](m��i)��ֹͣ���� P2640=1
�\(y��n)���^(gu��)����P2640=0�l(f��)��ֹͣ����t�S���Ԝp�ٶ�P2620�p��ͣ܇��
�����_(k��i)DI 3 ( r722.2=0 )�l(f��)���ܽ^�΄�(w��)����t�S�������p�ٶ�P2573�p��ͣ܇��
3. ����ˇ��Ҫ�O(sh��)������(g��)������(sh��)������̖(h��o)�Q������Ĉ�(zh��)�����̖(h��o)�� -1��ʾԓ������(zh��)�У���ʼ��̖(h��o)ȫ���� -1����
4. ͨ�^(gu��)6��(g��)��(sh��)����ݔ���c(di��n)�IJ�ͬ�M���x����Ҫ�ij���
5. ׃�l���\(y��n)�У��]��DI 4��r722.3=1������ Traversing ��ʽ ( P2631=1��Ч )�S���O(sh��)�����E�\(y��n)�С�

�Y(ji��)��(g��u)�f(shu��)����
P2616 (No.) ÿ��(g��)����Ҫ��һ��(g��)�΄�(w��)̖(h��o)���\(y��n)�Еr(sh��)�����΄�(w��)̖(h��o)����(zh��)�� �� -1 ��ʾ�o(w��)Ч���΄�(w��)��
P2621 (Job ) ��ʾԓ�����΄�(w��)����7 �N�΄�(w��)���x��Positioning ��λ�÷�ʽ����Endless_POS / Endless_NEG���� / �����ٶȷ�ʽ����Waiting���ȴ�parameter ��ָ���ĕr(sh��)�g���(zh��)����һ���� Goto�����D(zhu��n)��parameter��ָ���ij��� Set_O / Reset_O����λ/��(f��)λparameter ��ָ�����_(k��i)�P(gu��n)��ݔ���c(di��n)��
P2622 ( Parameter ) ��ه�ڲ�ͬ��Job����(du��)��(y��ng)��ͬ��Job�в�ͬ�ĺ��x����Ҋ(ji��n)List Manual��
P2623.8/9 ( Mode ) ���x��λ��ʽ���H��(d��ng)�΄�(w��) ( Job )��λ�÷�ʽ ( Position ) �r(sh��)��Ч
P2617/P2618/P2619/P2620 ( Position, Velocity, Acceleration, Deceleration ) ָ���\(y��n)��(d��ng)��λ�ã��ٶȣ���/�p��
P2623.4/5/6 ( Advance ) �ƶ����΄�(w��)�Y(ji��)����ʽ��END: ���΄�(w��)�Y(ji��)�����B�m(x��)��(zh��)����һ�΄�(w��)��Continue_With_Stop: ���΄�(w��)�Y(ji��)����(zh��n)�_��λ��늙C(j��)ֹͣ��������(d��ng)�_(k��i)ʼ��һ�΄�(w��)��Continue_Flying: ���΄�(w��)�Y(ji��)���B�m(x��)��(zh��)����һ�΄�(w��)��
P2623.0 ( Hide ) ���^(gu��)���l������(zh��)��ԓ�΄�(w��)��
��ه�� Job �ķ�ʽ��Configuration of digital output �H��(d��ng)Job �O(sh��)���� SET_O / RESET_O�r(sh��)��Ч�������O(sh��)���_(k��i)�P(gu��n)��ݔ����
ʾ����
����һ�γ���
���ٶ� 700 LU/min�� �� / �p�ٞ�100% �\(y��n)������(du��)λ�� 50000 LU �p��ֹͣ���ȴ� 30ms�������ٶ� 600 LU/min�� �� / �p�ٞ�100% �\(y��n)������(du��)λ�� 40000 LU �p��ֹͣ��
���Ƴ������£�


�ߡ��ք�(d��ng)��(sh��)��(j��)ݔ�루MDI��
Direct Setpoint Input / MDI ��ֱ���O(sh��)���c(di��n)ݔ�뷽ʽ/�ք�(d��ng)��(sh��)��(j��)ݔ�뷽ʽ��, MDI �Ŀs����(l��i)���� NC ���g(sh��)��Manual Data Input ��
ʹ��MDI �����҂����Ժ��p�ɵ�ͨ�^(gu��)�ⲿ����ϵ�y(t��ng)��(l��i)��(sh��)�F(xi��n)��(f��)�s�Ķ�λ����ͨ�^(gu��)����λ�C(j��)���Ƶ��B�m(x��)׃����λ�á��ٶȁ�(l��i)�M���҂��Ĺ�ˇ��Ҫ��
MDI �ЃɷN��ͬģʽ��
? λ�� ( position) ģʽ P2653=0��
? �ք�(d��ng)��λ��Q�ٶ�ģʽ( setting up ) P2653=1�@�ɷNģʽ���ھ��ГQ
�ٶ�ģʽ��ָ�S�����O(sh��)�����ٶȼ���/�p���\(y��n)�У������]�S�Č�(sh��)�Hλ�á�
λ��ģʽ��ָ�S�����O(sh��)����λ�á��ٶȡ���/�p���\(y��n)�У�
λ��ģʽ�ֿɷ֞�^��(du��)λ�� ��P2648=1���� ����(du��)λ�ã� P2648=0���ɷN��ʽ��
7.1 MDI ģʽ�������D��ʾ

7.2 ���� MDI ��ʽ������(sh��)����
1. �M(j��n)��ֱ�Ӕ�(sh��)��(j��)ݔ��/ MDI ģʽ
2. ��������������������ܽ^�΄�(w��) P2641=1���](m��i)��ֹͣ���� P2640=1
�\(y��n)���^(gu��)���п�ͨ�^(gu��)���_(k��i)(li��n)���cP2640���ⲿ�_(k��i)�P(gu��n)�l(f��)��ֹͣ����t�S���Ԝp�ٶ�P2620�p��ͣ܇��
�����_(k��i)(li��n)���cP2641���ⲿ�_(k��i)�P(gu��n)�l(f��)���ܽ^�΄�(w��)����t�S�������p�ٶ�P2573�p��ͣ܇
3. �O(sh��)���_(k��i)�P(gu��n)��ݔ���c(di��n)DI 9���ڼ���MDI���ܣ�P2647�顰1����Ч��
4. ���P(gu��n)��(sh��)��(j��)�O(sh��)��λ�á��ٶȡ��� / �p�ٶ� P2642 ~ P2645��

5. λ��ģʽ�x�� P2653
P2653=1���ٶȷ�ʽ��P2653=0��λ�÷�ʽ
6. ��λ��ʽ�x�� P2648
�^��(du��)λ�÷�ʽ��P2654=0, P2648=1������(du��)��λ��ʽ��P2654=**1*(16H)
7. �����O(sh��)��Դ P2651��P2652
8. ��(sh��)��(j��)��ݔ��ʽ (P2649) ����(sh��)��(j��)�O(sh��)��ֵ�_�J(r��n)����Դ( P2650)
S120 ��MDI �Ĕ�(sh��)��(j��)��ݔ�ɲ��ÃɷN��ʽ��
�B�m(x��)��ݔ P2649=1
�β���ݔ���������ش_�J(r��n) P2649=0
? ���^�β���ݔ��ָMDI ��(sh��)��(j��)�Ă�ݔ��ه�څ���(sh��) P2650 ���x����_(k��i)�P(gu��n)����̖(h��o)��ԓ����� ���ء� ��Ч��ÿ�Έ�(zh��)����һ��(g��)�C(j��)��������Ҫ�ٴ�ʩ�������أ��µ��ٶȡ�λ�õȲ�����Ч��
? �c�β���ݔ��ͬ��һ�������B�m(x��)��(sh��)��(j��)��ݔ��MDI ��(sh��)��(j��)��λ�á��ٶȡ��� / �p�ٶȣ����B�m(x��)����������Ч���o(w��)���_(k��i)�P(gu��n)ʹ�ܡ��@���҂��Ϳ�ͨ�^(gu��)��λ�C(j��)��(sh��)�r(sh��)�{(di��o)��Ŀ��(bi��o)λ�ü��S���\(y��n)���ٶȡ��� / �p�ٶȶ�����(hu��)ͣ�C(j��)
���T��G120����6SL3225-0BE33-0UA0